JDK26型双工业机器人检测分拣实训设备
一、设备介绍
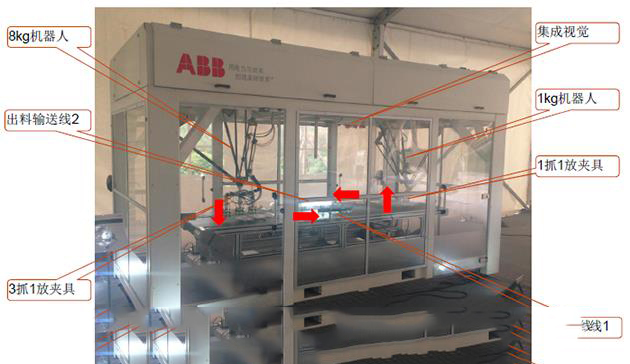
双工业机器人检测分拣设备本生产线为"袋件"自动检测分拣线,工作流程如:人工摆放药袋→输送带1传输→视觉1检测→ABB机器人1分拣→输送带2传输→视觉2检测→ABB机器人2搬运,循环工作。
本套系统相关参数:1、药片参数:130x85x5(mm),250ml液袋;(可调);2、分拣节拍:IRB360-8/1.13机器人采用三抓三放式,产能100件/分钟;
IRB360-1/1.13机器人采用一抓一放式,产能100件/分钟。
工艺要求:
1) 手动将输液袋散乱地分布于来料输送线1上;
2) 集成视觉检测来料产品的位置,并将数据传输给机器人1;
3) 机器人1通过吸盘夹具抓取产品;
4) 机器人1根据视觉数据将输液袋旋转角度,整齐地排列放置于输送线2上,1抓1放;
5) 输送线2将产品运送至机器人2的抓取位置,机器人2带动吸盘夹具,分3次抓3个产品;
6) 机器人2第四轴旋转,将产品偏转一定角度,1次性同时将3个产品随机角度放至来料输送带1上;7) 输液袋再经过集成视觉检测,机器人1抓放,实现循环。
二、设备参数
供电:单相220V,50-60Hz
功率:7kw
外形尺寸:5200mm×3200mm×1850mm,
空气质量:3级 DIN ISO 8573-1;
粉尘直径:< 0.005mm;
粉尘含量:< 5mg/m;
油污含量:< 1mg/m;